A robot turtle will help underwater archaeologists to inspect shipwrecks
Source: heritagedaily.com
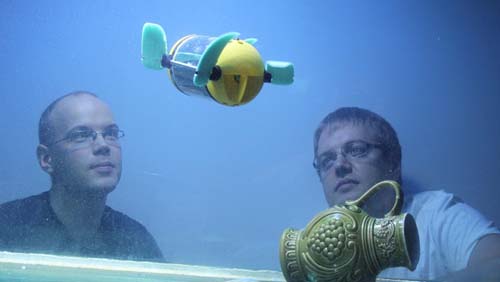
The Robot Safari in London Science Museum will see the world premiere of the underwater robot U-CAT, a highly maneuverable robot turtle, designed to penetrate shipwrecks.
 U-CAT’s locomotion principle is similar to sea turtles. Independently driven four flippers make the robot highly maneuverable; it can swim forward and backward, up and down and turn on spot in all directions. Maneuverability is a desirable feature when inspecting confined spaces such as shipwrecks. The robot carries an onboard camera and the video footage can be later used to reconstruct the underwater site.
U-CAT’s locomotion principle is similar to sea turtles. Independently driven four flippers make the robot highly maneuverable; it can swim forward and backward, up and down and turn on spot in all directions. Maneuverability is a desirable feature when inspecting confined spaces such as shipwrecks. The robot carries an onboard camera and the video footage can be later used to reconstruct the underwater site.“U-CAT is specifically designed to meet the end-user requirements. Conventional underwater robots use propellers for locomotion. Fin propulsors of U-CAT can drive the robot in all directions without disturbing water and beating up silt from the bottom, which would decrease visibility inside the shipwreck”, says Taavi Salumäe, the designer of the U-CAT concept and researcher in Centre for Biorobotics, Tallinn University of Technology.
“The so called biomimetic robots, robots based on animals and plants, is an increasing trend in robotics where we try to overcome the technological bottlenecks by looking at alternative technical solutions provided by nature ”, explains Prof. Maarja Kruusmaa, a Head of Centre for Biorobotics.
Underwater robots are nowadays mostly exploited in oil and gas industry and in defense. These robots are too big and also too expensive to be used for diving inside wrecks. Shipwrecks are currently explored by divers, but this is an expensive and time consuming procedure and often too dangerous for the divers to undertake. U-CAT is designed with the purpose of offering an affordable alternative to human divers.
[...]
Read the full article at: heritagedaily.com